All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(8 producten om uit te kiezen)
















 Klaar voor verzending
Klaar voor verzending












Arduino stapsgewijze motor tutorial vormen een essentieel component in het rijk van de vermogensoverdracht, vooral in toepassingen die een nauwkeurige controle van de beweging vereisen. Deze motoren zijn ontworpen om in discrete stappen te bewegen, wat nauwkeurige positionering en herhaalbaarheid mogelijk maakt, wat cruciaal is in gebieden als robotica, 3D-printing en CNC-machines. In tegenstelling tot traditionele motoren, hebben Arduino stapsgewijze motor tutorial geen feedbacksystemen nodig om hun positie te bepalen, waardoor ze eenvoudiger en kosteneffectiever zijn voor veel toepassingen. Hun vermogen om via digitale pulsen te worden bestuurd, maakt ze zeer compatibel met moderne elektronische systemen, waardoor de kloof tussen mechanische beweging en digitale controle naadloos wordt overbrugd.
Er zijn verschillende soorten Arduino stapsgewijze motor tutorial, elk geschikt voor verschillende toepassingen en prestatie-eisen. De meest voorkomende typen zijn permanente magneet-, variabele reluctantie- en hybride stappenmotoren. Permanente magneetstappenmotoren maken gebruik van een rotor met permanente magneet en staan bekend om hun eenvoud en kosteneffectiviteit, waardoor ze ideaal zijn voor toepassingen met een laag koppel. Variabele reluctantie stappenmotoren daarentegen maken geen gebruik van magneten; in plaats daarvan vertrouwen ze op het principe van magnetische reluctantie, wat snelle stapsnelheden mogelijk maakt. Hybride stappenmotoren combineren de kenmerken van zowel permanente magneet- als variabele reluctantie-motoren, waardoor hogere prestaties, een groter koppel en een fijnere stapresolutie mogelijk zijn. De keuze van Arduino stapsgewijze motor tutorial hangt grotendeels af van de specifieke eisen van de toepassing, zoals koppel, snelheid en precisie.
Arduino stapsgewijze motor tutorial bieden een scala aan functies en kenmerken die ze onmisbaar maken in precisietoepassingen. Een van hun belangrijkste functies is het omzetten van digitale pulsen in nauwkeurige mechanische beweging, waardoor een nauwkeurige controle over positie, snelheid en versnelling mogelijk is. Belangrijke kenmerken van Arduino stapsgewijze motor tutorial zijn een hoog koppel bij lage snelheden, een uitstekende stabiliteit bij lage snelheid en het vermogen om posities aan te houden zonder dat er stroom nodig is. Dit maakt ze bijzonder nuttig in toepassingen waar een nauwkeurige positionering cruciaal is, zoals bij 3D-printers en CNC-machines. Daarnaast zijn Arduino stapsgewijze motor tutorial bekend om hun duurzaamheid en betrouwbaarheid, vaak requiring minder onderhoud dan andere motortypes vanwege hun eenvoudige constructie en gebrek aan borstels.
De constructie van Arduino stapsgewijze motor tutorial omvat het gebruik van diverse materialen om de prestaties en duurzaamheid te optimaliseren. De rotor is meestal vervaardigd van hoogwaardige ferromagnetische materialen, die de magnetische prestaties en efficiëntie verbeteren. De stator, waarin de wikkelingen zijn ondergebracht, is vaak gemaakt van gelamineerd staal om wervelstroomverliezen te minimaliseren. Koperen wikkelingen worden veel gebruikt in Arduino stapsgewijze motor tutorial vanwege hun uitstekende elektrische geleidbaarheid, die zorgt voor een efficiënte omzetting van elektrische energie in mechanische beweging. De gebruikte materialen in Arduino stapsgewijze motor tutorial zijn gekozen om een evenwicht te bieden tussen prestaties, duurzaamheid en kosten, waardoor een betrouwbare werking in veeleisende omgevingen wordt gegarandeerd. Advances in material science blijven de verbeteringen in motor efficiency en prestaties aandrijven.
Om Arduino stapsgewijze motor tutorial effectief te gebruiken, is het belangrijk om de werkingsprincipes en beperkingen ervan te begrijpen. Een juiste selectie van het motortype op basis van het vereiste koppel, snelheid en precisie van de toepassing is cruciaal. Voor optimale prestaties moeten Arduino stapsgewijze motor tutorial worden aangedreven met een geschikte driver die overeenkomt met de specificaties van de motor, waardoor een soepele en nauwkeurige werking wordt gewaarborgd. Het is ook belangrijk om te letten op de voedingsspanning en stroombehoefte om oververhitting te voorkomen en een efficiënte werking te garanderen. In toepassingen die een hoge precisie vereisen, kunnen microstepping-technieken worden toegepast om de resolutie en de soepelheid van de beweging te verbeteren. Regelmatig onderhoud, zoals het controleren van verbindingen en het waarborgen van adequate koeling, kan helpen om de levensduur van Arduino stapsgewijze motor tutorial te verlengen en hun prestaties op lange termijn te behouden.
Bij het selecteren van Arduino stapsgewijze motor tutorial voor jouw toepassing, moeten verschillende factoren worden overwogen om optimale prestaties te garanderen. De eerste overweging is de koppelbehoefte, die bepaalt hoe krachtig de motor moet zijn om een bepaalde last te bewegen of vast te houden. Voor toepassingen die een hoog koppel vereisen, zijn hybride stappenmotoren vaak geschikt, terwijl voor toepassingen met een lager koppel de permanente magneettypen kunnen voldoen. Daarnaast speelt de bedrijfsomgeving een cruciale rol; motoren die in ruwe omstandigheden worden gebruikt, moeten een robuuste constructie en materialen hebben die bestand zijn tegen slijtage. Het is ook essentieel om rekening te houden met de gewenste stapresolutie, omdat fijnere stappen zorgen voor een grotere nauwkeurigheid in de controle.
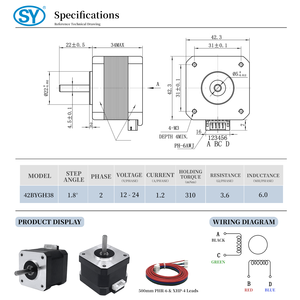
Het begrijpen van de specificaties van Arduino stapsgewijze motor tutorial is essentieel voor het maken van een weloverwogen keuze. Belangrijke specificaties zijn onder meer de stappenhoek, die de resolutie en soepelheid van de beweging beïnvloedt. Kleinere stappenhoeken bieden een preciezere controle, wat voordelig is in toepassingen zoals CNC-machines. De voltage- en stroomwaarden zijn ook belangrijk, omdat ze de stroomopname en efficiëntie van de motor bepalen. Verder is het houdkoppel een kritieke parameter, die aangeeft hoeveel koppel de motor kan weerstaan zonder te bewegen, wat cruciaal is in toepassingen die stabiliteit en precisie vereisen. Door deze specificaties te evalueren, kan de motor worden afgestemd op de specifieke eisen van de toepassing.
Arduino stapsgewijze motor tutorial worden veelvuldig gebruikt in verschillende industriële en huishoudelijke toepassingen vanwege hun nauwkeurige controle-eigenschappen. In de medische sector worden ze ingezet in apparatuur zoals infuuspompen en beeldvormende machines, waar nauwkeurige positionering van belang is. De automotive-industrie maakt gebruik van deze motoren in systemen die betrouwbare en herhaalbare beweging vereisen, zoals in de elektronische gasklepregelaar. In de consumentenelektronica zijn stappenmotoren essentieel in apparaten zoals printers en camera's, waar ze een precisiebeweging bieden voor hoogwaardige uitvoer. Elk van deze toepassingen vereist een zorgvuldige overweging van de specificaties van de motor om te waarborgen dat deze voldoet aan de noodzakelijke prestatienormen.
Het belangrijkste verschil tussen Arduino stapsgewijze motor tutorial en servomotoren ligt in hun controlemechanismen. Stappenmotoren bewegen in discrete stappen en vereisen geen feedbacksystemen voor de positiecontrole, wat ze eenvoudiger en vaak kosteneffectiever maakt. Servomotoren daarentegen zijn afhankelijk van feedbacksystemen om een precieze positionering te bereiken, waardoor ze een soepelere beweging en hogere snelheden mogelijk maken.
Om de precisie van Arduino stapsgewijze motor tutorial te verhogen, kunnen microstepping-technieken worden toegepast, die elke volledige stap onderverdelen in kleinere incrementen. Dit verhoogt de resolutie en zorgt voor een soepelere beweging, wat vooral in precisie-toepassingen essentieel is. Daarnaast kan het optimaliseren van de instellingen van de driver en het minimaliseren van de mechanische speling bijdragen aan een verhoogde nauwkeurigheid.
Hoewel Arduino stapsgewijze motor tutorial uitblinken in toepassingen waar nauwkeurigheid bij lage snelheden vereist is, kunnen ze ook in hoge-snelheidsscenario's worden ingezet door het juiste type motor en driver te selecteren. Hybride stappenmotoren bieden vaak betere prestaties bij hogere snelheden vanwege hun ontwerp. Het is echter belangrijk om de specificaties van de motor af te stemmen op de snelheidsvereisten om prestatieproblemen te voorkomen.
Het onderhoud van Arduino stapsgewijze motor tutorial omvat meestal regelmatige controle van de elektrische verbindingen en het waarborgen van adequate koeling om oververhitting te voorkomen. Anders dan geborstelde motoren hebben stappenmotoren geen borstels die slijten, wat de onderhoudsbehoeften vermindert. Desondanks kan periodiek inspecteren van mechanische componenten en smeren nodig zijn om optimale prestaties te behouden.
Ja, Arduino stapsgewijze motor tutorial kunnen in batterijgevoede apparaten worden gebruikt, mits het stroomverbruik van de motor compatibel is met de batterijcapaciteit van het apparaat. Het selecteren van motoren met lagere voltage- en stroomvereisten kan helpen om de batterijduur te optimaliseren. Daarnaast kunnen efficiënte driver-circuits het stroomverbruik verder verminderen, waardoor ze geschikt zijn voor draagbare toepassingen.